
ROS-integraatio robokädelle
Robokädestä ei ole paljonkaan hyötyä, ellei sitä voi ohjata järkevästi. Robotin omat RAPL-3 kieli sekä robcomm3-ohjaussovellus tuntuvat ehkä hieman.. vanhahtavilta. Eikä niille oikein ole suoraan tukea missään nykyaikaisessa sovelluksessa, joskin kaupallinen robodk luultavasti melko pienellä vaivalla tuottaisi myös RAPL-3-ohjauskoodia.
Kuvassa robcomm3.
Sen sijaan päädyin avoimen lähdekoodin Robot Operating Systemiin. Siinä on jo valmiiksi laaja tuki robokäsien ohjaukselle ja liikepolkujen suunnittelulle. Koska labin CRS F3 on mekaanisesti sama kuin Kuka Roboticsin alkuperäinen KR3-malli, löytyi suoraan Kukan sivuilta 3D-malli robokädestä. Tätä piti vähän pyöritellä FreeCADilla ja Blenderillä jotta sen sai sopivaan muotoon ROS:lle. Lisäksi piti tehdä URDF-muotoinen speksi siitä mitkä ovat tarkat etäisyydet ja kääntökulmat eri akseleille. Nämä muutokset on pistetty pull-requestina ros-industrial projektille, joten ehkä niistä on aikanaan hyötyä myös muille tätä robottia käyttäville.
Omalla koneella 3D-malli toimikin jo mainiosti, mutta robokäden koneella robotti oli pahaenteisesti räjähtänyt jo simulaatiossa:
Pienen googlettelun jälkeen selvisi että kyse on ROS:n bugista, jossa URDF-tiedostoa luetaan vahingossa käyttäjän LC_NUMERIC-localella. Robokäden Ubuntu oli oletuksena laittanut täksi fi_FI.UTF-8, vaikka kieli muuten onkin englanti. No, tuohan on täysin käyttökelvoton locale muutenkin kun joka paikkaan tulee pilkkuja desimaalipisteiden sijaan, ja tuo pilkkuvirhe rikkoi myös URDF:n luvun ja räjäytti 3D-mallin. Locale kuntoon ja jo näytti paremmalta.
Robotin ja ROS:n välille tarvitaan kaksisuuntainen kommunikaatio: ROS antaa liikekäskyjä robotille (joint trajectory action), ja robotti lähettää jatkuvasti sen hetkistä tilaansa (robot state reporting) takaisin ROS:lle. Turvallisempi ja helpompi on lähteä ensin toteuttamaan tuota robot state reporting -puolta, koska tällöin käsi ei ainakaan lähde lapasesta.
Aluksi lähdin toteuttamaan tätä rosserial-protokollan pohjalta, jolla voi lähetellä suoraan sarjaportin yli ROS:n rosmsg-viestiformaatissa olevaa dataa. Tämä tuli toteutettua RAPL-3:lla ja koodia kertyi n. 400 riviä. No, jotain pientä ongelmaa siinä oli mutta suunnilleen toimi.
Sitten satuin kuitenkin huomaamaan, että ROS:ssa on myös erityisesti robottikäsille tarkoitettu simple_message-protokolla. Nimensä mukaisesti se on huomattavasti simppelimpi toteuttaa, ja vie vähemmän tiedonsiirtokapasiteettiakin sarjaportista. Sen toteutus kävikin parilla sadalla rivillä.
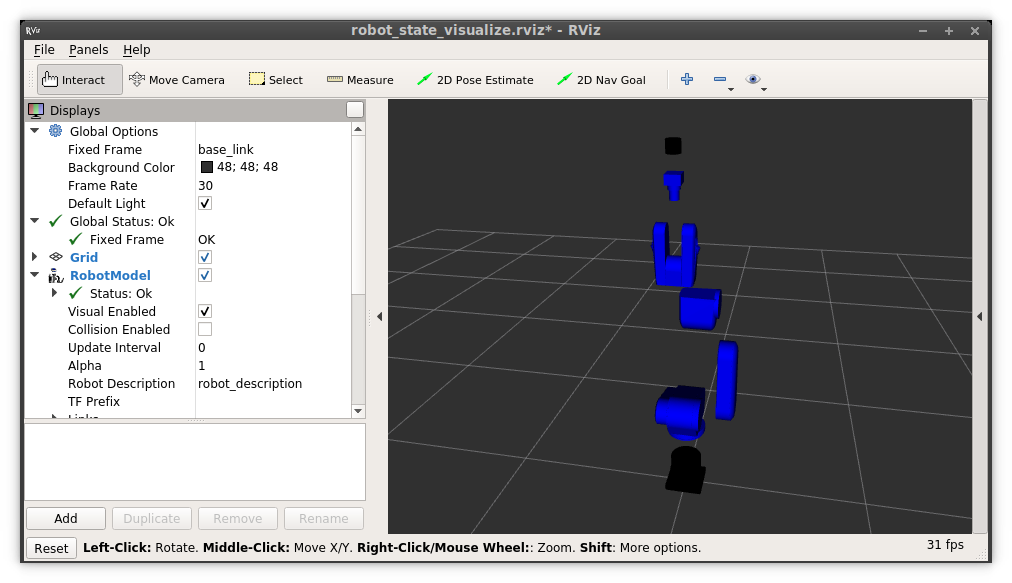
Nyt ROS näkee robotin tilan ja liikkeet:
Jotain pientä ongelmaa kuitenkin vielä on. Sarjaporttiliikenteessä robokädeltä PC:lle päin tippuu joskus tavuja pois välistä. Tämä siitä huolimatta, että periaatteessa käytössä on RTS/CTS kättely. Ja yllättävää myös siltä kannalta, ettei PC:llä pitäisi olla mitään ongelmia käsitellä 11 kilotavua dataa sekunnissa, lähetti robokäsi sitä kuinka nopeasti tahansa.
Testailun myötä vaikuttaisi että nollamodeemikaapeli on kytketty oikein ja rts/cts menevät päästä päähän ja ristiin. Sen sijaan robokäsi jättää ne tyytyväisenä huomioimatta, sarjaporttiin pystyy kirjoittamaan vaikka CTS:n laittaisi 9 voltin paristolla jatkuvasti blokkaavaan tilaan.
Ilmeisesti robokäden CROS-käyttiksessä ei jollain tavalla toimi blokkaavat kirjoitukset sarjaporttiin. Sama ongelma on avasi portin O_NONBLOCK tilassa tai synkronisena. Noh, pahimmassa tapauksessa täytyy vain tehdä jokin purkka että koodissa mdelay():lla odotellaan sopivasti että puskuri ei täyty liikaa.
comments
Add comment