CNC:n X-akseli paikalleen
CNC-projekti on edennyt sitten edellisen päivityksen sen verran, että kummassakin pystytolpassa on nyt trapetsiruuvit paikallaan. Trapetsimutterien hitsauksesta ei tullut näemmä otettua kuvaa, mutta täytyy todeta että umpiteräkseen puikkohitsaaminen oli huomattavasti ohutseinäistä putkea miellyttävämpää.
Runko on mitoitettu siten, että X-akselin lineaariyksikkö solahtaa paikalleen lähes sellaisenaan. Päädyin lisäämään lineaariyksikön valurautarungon nurkkiin M8-pultit. Niiden kannat lepäävät kummassakin päässä Z-akselin kelkkojen yläreunoja vasten ja varmistavat siten että kiinnitys pysyy aina samalla korkeudella, eikä pääse luistamaan pulttiliitoksissa. Rungon läpi Z-akselin kelkkoihin menee kummassakin päässä kaksi M8-pulttia jotka ovat se varsinainen kiinnitys, mutta tällä tavalla vaikka ne löystyisivätkin ei tapahtuisi mitään ihmeellistä.

X-akselin keplottelu paikalleen pystytolppien toiselle puolelle edellytti vähän urheilua, mutta onnistui sentään ilman että jäi sormia väliin. Se täytyy tosin vielä jossain vaiheessa irrottaa rungon maalausta ja viimeistelyä varten. Seuraavaa kasausta varten kannattanee laittaa se jo valmiiksi tolppien taakse ennen kuin ne ruuvaa kiinni.
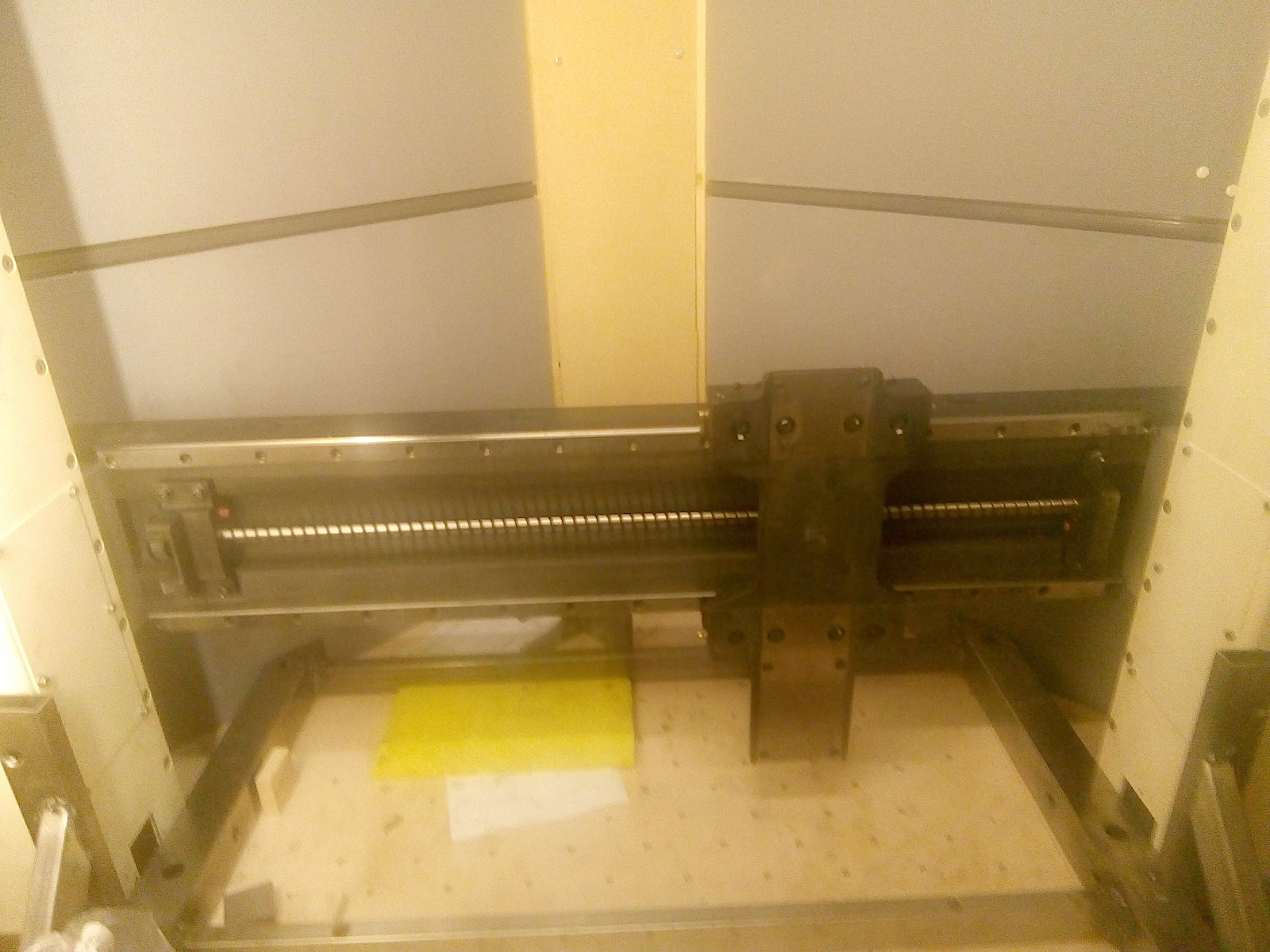
Ensituntumalta kokonaisuus vaikuttaa hyvinkin tukevalta, vaikkei rakennetta jäykistävää yläpalkkia ole vielä olemassa.
Seuraavana vaiheena projektissa on aloittaa sähköistyspuolta, eli ohjaus-PC:tä ja moottorien ohjauksia. Jälkimmäiseen onkin jo osia tilattu ja se saapuvat toivottavasti ennen jouluruuhkia.
Ohjaus-PC:ksi täytyy etsiä Hacklabin vanhojen koneenrunkojen joukosta jokin sopiva.
Kriteereinä ovat:
- Vähintään dual-core prosessori.
- Riittävästi muistia ja prossua että nettiselainta pystyy käyttämään.
- Ainakin yksi, mieluiten useampi vapaa PCI- tai PCIe-paikka.
- Kohtuulliset tulokset LinuxCNC:n livetikulla ajetusta latenssitestistä.
Labin ensimmäisessä CNC:ssä ohjauskoneena on vanha Thinkpad-läppäri, jossa on puutteita kaikissa näistä kohdista. Nyt haussa olisi siis vähän tehokkaampi ja pöytämallin kone.
Aiemmassa CNC:ssä käytössä oli kaikkein perinteisin ohjaustapa, eli rinnakkaisportista tulevat signaalit askelmoottoriohjaimelle. Se vaatii erittäin reaaliaikaista toimintaa PC:ltä, ja Thinkpadista pitikin viritellä kaikki virransäästöt yms. ACPI-keskeytykset pois jotta siihen päästiin. Tällä kertaa tarkoitus on käyttää Mesa Electronicsin FPGA-korttia, joka hoitaa itsenäisesti nopeimmat reaaliaikatoiminnot eli moottorien ohjaussignaalit. PC:n ajettavaksi jää servolooppi, jossa katsotaan akselien sijainnit enkooderien perusteella ja säädetään moottoritehoa tarpeen mukaan, yleensä n. 1-5 kHz taajuudella. Tässä ei edes 50 µs vaihtelu latenssissa haittaa kovin paljoa, joten todennäköisesti siitä ei konevalinta jää kiinni.
comments
Add comment